
Jag Sarangapani
William A. Rutledge - Emerson Electric Company Distinguished Professor
Electrical and Computer Engineering
- sarangap@mst.edu
- Phone: (573) 341-6775
- 222 Emerson Hall
Dr. Jagannathan Sarangapani is at the Missouri University of Science and Technology (formerly University of Missouri-Rolla) where he is a Rutledge-Emerson Distinguished Professor of Electrical and Computer Engineering. He served as a Director for the NSF Industry/University Cooperative Research Center on Intelligent Maintenance Systems for 13 years. His research interests include learning, adaptation and control, secure human-cyber-physical systems, prognostics, and autonomous systems/robotics.
He has coauthored 180 peer reviewed journal articles, 289 refereed IEEE conference articles, written several book chapters, authored/co-edited 6 books, received 21 US patents and one patent defense publication. He graduated 30 doctoral and 31 M.S thesis students. He was a co-editor for the IET book series on control from 2010 until 2013 and now serving on many editorial boards including IEEE Systems, Man and Cybernetics, IEEE Transactions on Neural Networks and Learning Systems and others. He received many awards including the 2018 IEEE CSS Transition to Practice Award, 2007 Boeing Pride Achievement Award, 2001 Caterpillar Research Excellence Award, and 2000 NSF Career Award, has been on organizing committees of several IEEE Conferences. He is a Fellow of the IEEE, National Academy of Inventors, and Institute of Measurement and Control, UK and Institution of Engineering and Technology (IET), UK.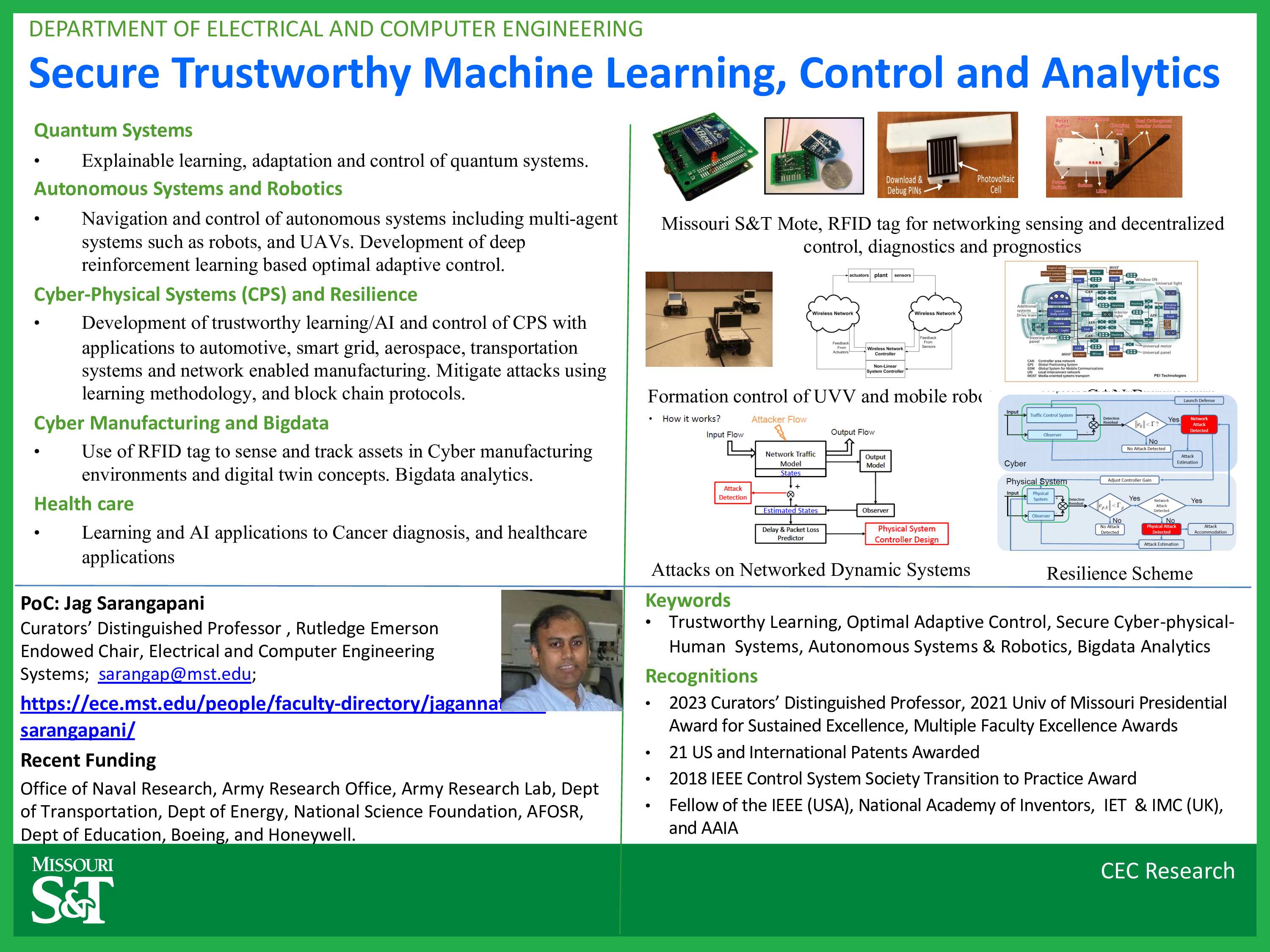
Publications:
Resume/CV:
Personal Website:
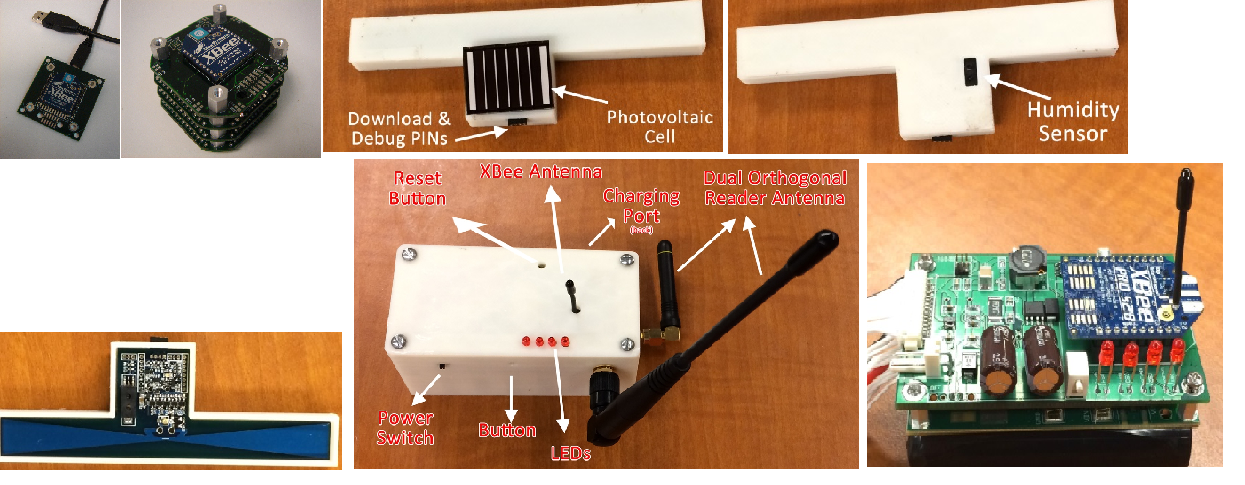
- Secure Wireless Adhoc, Sensor and Passive RFID Networks
- Event Triggered Control of Networked Control Systems/Cyber Physical Systems
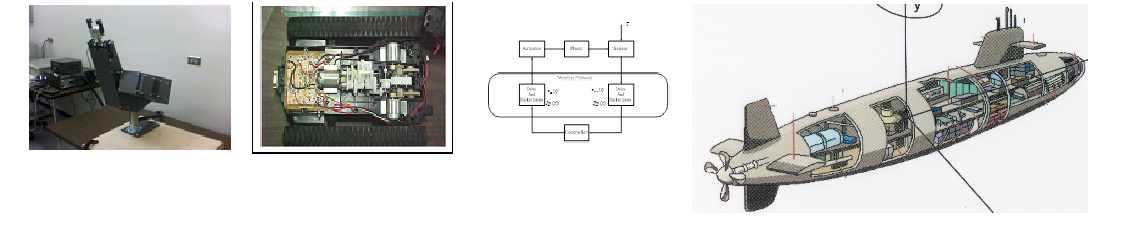
- Formation Control of Mobile Robots and Unmanned Aerial Vehicles
- Industry/University Cooperative Research Center for IMS
- Control Apps Smart Grid, Detection of Unintended Emissions, Nano/MEMS Assembly
Secure Wireless Adhoc, Sensor and Passive RFID Networks
Secure Wireless Adhoc, Sensor and Passive RFID Networks
INVESTIGATORS
Jag Sarangapani (sarangap@mst.edu, 573-341-6775)
FUNDING SOURCE
Department of Education, Boeing, National Science Foundation
PROJECT DESCRIPTION
This project intends to develop novel sensors, networking protocols for passive RFID and active wireless networks, localization and data aggregation schemes, energy efficient distributed schemes, self organizing networking architectures for wireless ad hoc, sensor and RFID networks and security assurance schemes. The application of these networks in network enabled manufacturing is being evaluated.
View Web Link for this Project
PUBLICATIONS
- “EPC Gen2v2 RFID standard authentication and ownership management protocol”, Haifeng Niu, E. Taquiedin, and S. Jagannathan, IEEE Transactions on Mobile Computing, vol. 15, no. 1, pp. 137-149, 2016.
- “Optimal defense and control of dynamic systems modeled as cyber-physical systems”, Haifeng Niu and S. Jagannathan, Journal of Defense Modeling and Simulation, vol. 12, no. 4, pp. 423-438, 2015.
- “Neural network-based attack detection in nonlinear networked control systems”, Haifeng and S. Jagannathan, Proc. of the IEEE International Joint Conference on Neural Networks, pp. 4249-4254, July 2016.
- “Optimal defense and control for cyber-physical systems”, Haifeng Niu and S. Jagannathan, Proc. of the Symposium Series on Computational Intelligence, pp. 634-639, December 2015.
- “A Gen2v2 Compliant RFID authentication and ownership management protocol”, Haifeng Niu and S. Jagannathan, Proc. of the IEEE Conference on Local Computer Networks, pp. 331-336, September 2014.
- “A cross-layer routing scheme for passive RFID tag-to-tag communication”, Haifeng Niu and S. Jagannathan, Proc. of the IEEE Conference on Local Computer Networks, pp. 438-441, September 2014.
- “Localization and tracking of objects using cross-correlation of shadow fading noise”, R. Basheer and S. Jagannathan, IEEE Transactions on Mobile Computing, vol. 13, no. 10, pp. 2293-2305, Oct 2014.
- “Localization of RFID tags using stochastic tunneling”, R. Basheer and S. Jagannathan, IEEE Transactions on Mobile Computing, Vo. 12, no. 6, pp. 1225-1235, June 2013.
- ”A new data aggregation scheme via adaptive compression for wireless sensor networks”, Priya Kasirajan, Carl Larsen, and S. Jagannathan, ACM Transactions on Sensor Networks, vol.9, no.1, pp. 5:1-5:26, Feb. 2013.
- “Passive RFID tag with multimodal sensors with applications”, Haifeng Niu and S. Jagannathan, Proceedings of the IEEE International Instrumentation and Measurement Technology Conference (I2MTC), May 2013.
Event Triggered Control of Networked Control Systems/Cyber Physical Systems
Event-Triggered Control of Networked Control Systems/Cyber-Physical Systems by using Adaptive Dynamic Programming
INVESTIGATORS
Jag Sarangapani (sarangap@mst.edu, 573-341-6775)
FUNDING SOURCE
National Science Foundation
PROJECT DESCRIPTION
Many real-time systems such as smart grid, automotive control systems are implemented as distributed event triggered control systems wherein the control loops are closed through a real-time communication network with limited resources. Such systems are referred to as Network Control Systems(NCS) or Cyber-physical Systems. The interest for NCS is motivated by many benefits they offer such as the ease of maintenance and installation, large flexibility and the low cost. Adding resource constrained communication network in the feedback control loop, however, brings challenging issues which have to be investigated before the above benefits are harvested. The network imperfections such as time-varying delays, packet losses, quantization, and limited network resources can degrade the performance of control systems and they can even destabilize the system. Therefore, the optimal event triggered controller design of NCS in the presence of event-based sampling has to be investigated.
Therefore, the goal of this study is to provide time-based online adaptive critic event triggered ADP controllers forward-in-time, without utilizing policy and value iteration, but with adaptation, optimization, and learning for the control of unknown linear and nonlinear NCS, has guaranteed performance, and is supported by a rigorous and repeatable design and mathematical framework.
View Web Link for this Project
PUBLICATIONS
- “Stochastic optimal regulation of nonlinear networked control systems by using event-driven adaptive dynamic programming”, Avimanyu Sahoo and S. Jagannathan, IEEE Transactions on Systems, Man and Cybernetics, accepted for publication, January 2016.
- “Approximate optimal control of affine nonlinear continuous-time systems using event sampled neuro-dynamic programming”, Avimanyu Sahoo, Hao Xu and S. Jagannathan, IEEE Transactions on Neural Networks and Learning Systems, accepted for publication, February 2016.
- “Near-optimal event-triggered control of nonlinear discrete-time systems using neuro-dynamic programming”, A. Sahoo, H. Xu and S. Jagannathan, IEEE Transactions on Neural Networks and Learning Systems, Vol. 27, Issue 9, pp. 1801 – 1815, September 2016.
- "Distributed adaptive optimal regulation of uncertain large-scale interconnected systems using hybrid Q-learning approach," V. Narayanan and S. Jagannathan, IET Control Theory & Applications, vol. 10, no. 12, pp. 1448-1457, 2016.
- “Neural network-based event-triggered state feedback control of nonlinear continuous-time systems”, A. Sahoo, H. Xu and S. Jagannathan, IEEE Transactions on Neural Networks and Learning Systems, vol. 27. No. 3, pp.497-509, March 2016.
- “Adaptive neural network-based event-triggered control of single-input-single-output nonlinear discrete-time systems”, A. Sahoo, H. Xu and S. Jagannathan, IEEE Transactions on Neural Networks and Learning Systems, vol. 27, no. 1, pp. 151-164, January 2016.
Formation Control of Mobile Robots and Unmanned Aerial Vehicles
Formation Control of Mobile Robots and Unmanned Aerial Vehicles

INVESTIGATORS
Jag Sarangapani (sarangap@mst.edu, 573-341-6775)
FUNDING SOURCE
National Science Foundation
PROJECT DESCRIPTION
In this project, the following objectives will be addressed:
- Development and verification of a mathematical framework for formation control of mobile robots and unmanned aerial vehicles.
- Development of adaptive neural network controllers for guaranteed performance.
View Web Link for this Project
PUBLICATIONS
- “Neural network-based finite horizon optimal adaptive consensus control of mobile robot formations”, Haci Guzey, Hao Xu and S. Jagannathan, Optimal Control, Methods and Applications, Accepted for publication, October 2015.
- “Neuro-optimal control of an unmanned helicopter”, David Nodland, H. Zargarzadeh, A. Ghosh, and S. Jagannathan, Journal of Defense Modeling and Simulation, in Guest editorial by Greg Hudas, D. Mikulski, and F. Lewis, vol. 11, no. 1, pp.5-18, January 2014.
- “Neural network-based optimal control of mobile robot formation with reduced information exchange”, T. Dierks, B. Brenner and S. Jagannathan, IEEE Transactions on Control Systems Technology, vol. 21, no. 4, 1407-1415, July 2013.
- “Neural network-based optimal adaptive output feedback control of a helicopter UAV”, David Nodland, Hassan Zargarzadeh and S. Jagannathan, IEEE Transactions on Neural Networks and Learning Systems, vol. 24, no. 7, pp. 1061-1073, July 2013.
- “An online model-based fault accommodation scheme for nonholonomic mobile robots in formation”, T. Dierks, B. Thumati, and S. Jagannathan, Journal of Defense Modeling and Simulation, in Guest editorial by Greg Hudas, D. Mikulski, and F. Lewis, vol. 9, no. 1, pp.17-32, January 2012.
- “Discrete time optimal control of nonholonomic mobile robot formations using linearly parameterized neural networks”, T. Dierks, B. Brenner, and S. Jagannathan, International Journal of Robotics and Automation, vol. 26, no. 1, pp. 76-85, 2011. (invited)
Industry/University Cooperative Research Center for IMS
Industry/University Cooperative Research Center for Intelligent Maintenance Systems (IMS)

INVESTIGATORS
Jag Sarangapani (sarangap@mst.edu, 573-341-6775), Maciej Zawodniok
FUNDING SOURCE
National Science Foundation
INDUSTRIAL MEMBERS
Boeing, Technical Data Analysis, AmpliSine
PROJECT DESCRIPTION
This effort involves development of monitoring, diagnostics and prognostics algorithms for a class of nonlinear systems. Both data-driven and model-based schemes are being developed as part of this effort. Online approximators such as neural networks, artificial immune systems are being considered for approximating the fault dynamics. Fault accommodation schemes are being designed by controller reconfiguration.
View Web Link for this Project
PUBLICATIONS
- “Model-based fault detection, estimation and prediction for a class of linear one-dimensional PDE”, Jia Cai, H. Ferdowsi and S. Jagannathan, Automatica, vol. 66, pp. 122-131, March 2016.
- “A model based fault prognostics scheme for Takagi-Sugeno systems”, Balaje Thumati, Miles Fienstein and S. Jagannathan, IEEE Transactions on Fuzzy Systems, vol. 22, no. 4, pp. 736-748, June 2014.
- “A model based fault prognostics scheme for uncertain nonlinear discrete-time systems with multiple distinct faults”, Balaje Thumati and S. Jagannathan, Transactions of the Institute of Measurement and Control, UK, Vol. 36, no.4, pp. 445-464, May 2014.
- “An online outlier identification and removal scheme for improving fault detection performance”, H. Ferdowsi, S. Jagannathan, and M. Zawodniok, IEEE Transactions on Neural Networks and Learning Systems, vol. 25, no. 5, pp. 908-919, May 2014.
Control Apps Smart Grid, Detection of Unintended Emissions, Nano/MEMS Assembly
Control Applications Smart Grid, Detection of Unintended Emissions, Nano/MEMS Assembly
INVESTIGATORS
Jag Sarangapani (sarangap@mst.edu, 573-341-6775)
FUNDING SOURCE
Intelligent Systems Center, National Science Foundation
PROJECT DESCRIPTION
This effort involves successfully developing controllers for a class of nonlinear systems with potential applications to power, assembly of MEMS and Nano devices.
PUBLICATIONS
- "Distributed adaptive optimal regulation of uncertain large-scale interconnected systems using hybrid Q-learning approach," V. Narayanan and S. Jagannathan, IET Control Theory & Applications, vol. 10, no. 12, pp. 1448-1457, 2016.
- “Analysis of localization methods for unintended emitting sources”, N. Guzey, M. T. Ghasr, and S. Jagannathan, Measurement Science and Technology, Accepted for publication, August 2016.
- “Localization of near-field sources in spatially colored noise”, N. Guzey, Hao Xu, and S. Jagannathan, IEEE Transactions on Instrumentation and Measurement, vol. 64, no. 8, pp 2302-2311, August 2015.
- “Detection and localization of multiple R/C electronic devices using array detectors”, V. Thotla, M. Zawodniok, M. Ghasr, S. Jagannathan, and S. Agarwal, IEEE Transactions on Instrumentation and Measurement, vol. 64, no. 1, pp. 241-251, January 2015.
- “Localization of near-field radio controlled unintended emitting sources in the presence of multipath fading”, N. Guzey, Hao Xu, and S. Jagannathan, IEEE Transactions on Instrumentation and Measurement, Vol. 63, no. 11, pp. 2696-2703, Nov 2014.
Follow Intelligent Systems Center